
رباتها معمولا محدوديتهاي خود را ميشناسند اما به اين معني نيست كه آنها را ميپذيرند. اين ربات از ابزارهايي براي توسعهي قابليتهاي خود استفاده ميكند و با اشياي مجاور خود مسيرها و پلهايي را براي عبور خود ميسازد. ديدن تلاش اين ربات لذتبخش و درعينحال نگرانكننده است.
پژوهشگرهاي كرنل و دانشگاه پنسيلوانيا اخيرا موفق به ساخت رباتي شدهاند كه از اشياي اطراف خود براي انجام يك وظيفهي خاص كمك ميگيرد. از آنجا كه بخشهاي مختلف اين ربات از يكديگر جدا ميشوند و ميتوانند بهصورت مستقل عمل كنند اين ربات مثل مجموعهاي از چند ربات است؛ اما در اينجا بحث سر تعدد يا واحد بودن سيستمهاي ماژولار رباتيك نيست!
SMORES-EP رباتي است كه پژوهشگرها يك مجموعهي تعريفشده از اطلاعات را به آن دادهاند. اين ربات با دوربين كوچك خود به بررسي محيط ميپردازد و بر همين اساس دادههاي مفيدي مثل غلتاندن يك شيء يا عبور از يك شكاف را دريافت ميكند.
اين ربات از روش تعامل با اشياي خاص و عملكرد آنها هم آگاه است؛ براي مثال ميتواند از آهنرباهاي تعبيهشدهي خود براي باز كردن يك كشو يا از يك سطح شيبدار براي بالا رفتن از يك شيء تا يك ارتفاع مشخص استفاده كند.
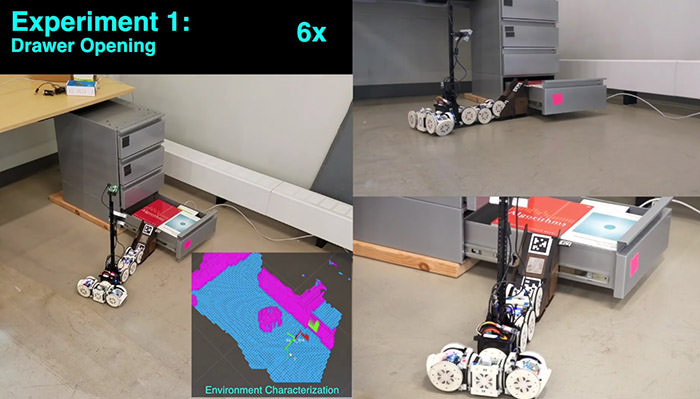
يك سيستم برنامهريزي نمايندگي كيوسرا سطح بالا قطعات ربات را بر اساس اطلاعات دادهشده هدايت ميكند البته لازم نيست هر بخش ربات اين دانش را داشته باشد. براي مثال برنامهريز ربات با دريافت دستور يافتن اشياي موجود در كشو ميداند كه براي انجام اين كار بايد كشو را باز كند؛ ربات آهنربايي بايد از يك زاويهي مشخص به كشو بچسبد تا بتواند آن را باز كند و اگر نياز به يك شيء ديگر مثلا يك سطح شيبدار داشته باشد آن را هم كنترل ميكند و در محل مناسب قرار ميدهد. ويدئوي زير آزمايش سيستم رباتي را نشان ميدهد، در اين آزمايش ربات بايد يك وظيفهي سطح بالا را با استفاده از قالب محدود اما پيچيدهاي از اطلاعات انجام دهد.
در اين ويدئو، از ربات خواسته ميشود در كشوها به دنبال اشياي مشخصي بگردد. اشياي موردنظر در كشوري اول وجود ندارند، بنابراين انتظار ميرود كشوي بعدي را باز كند؛ اما اين كشو در ارتفاع بالاتري قرار دارد بنابراين بايد به بالاي كشوي اول برود كه از شانس خوب ربات پر از كتاب و داراي يك لبهي برآمده است. برنامهريز ربات مشاهده ميكند يك سطح شيبدار در نزديكي ربات قرار دارد و به او دستور ميدهد آن را در محل موردنظر قرار دهد و سپس بخشي از ربات براي بالا رفتن و باز كردن كشو بالا ميرود، درحاليكه بخش ديگر از دوربين خود براي بررسي محتويات كشو استفاده كرده و درنهايت هدف پيدا ميشود!
مقالههاي مرتبط:
در عمليات بعدي، ربات بايد از شكاف بين دو ميز عبور كند. خوشبختانه، اشيايي در اطراف آن وجود دارد كه ميتواند به عنوان پل از آنها استفاده كند. ربات پس از بررسي صحنه پل را در محل موردنظر قرار ميدهد و به سمت هدف حركت ميكند. اين نمونهها به نظر آماده ميرسند اما اين فقط به توانايي ربات وابسته نيست بلكه به دستور موردنظر براي ساخت يك پل خوب هم وابسته است. ايدهي اصلي ساخت اين ربات، ساخت سيستمهايي است كه ازنظر منطقي و بر اساس دادههاي جهان واقعي به موقعيتهاي واقعي نزديك شوند و با اشياي واقعي مسئله را حل كنند. توانايي ساخت يك پل از ابتدا خوب است اما تا زماني كه ندانيد پل را براي چه كاري ميسازيد، چه زماني و چگونه بايد آن را پيادهسازي كنيد و كجا و چگونه بايد آن را اجرا كنيد، در حد يك مسئله و جستوجو باقي ميماند.
بسياري از رباتهاي اينچنين در درجهي اول هيچ ايدهاي از وظيفهي خود ندارند، مگر اينكه از قبل به آنها بگوييد چه چيزي درون كشو قرار دارد؛ يعني براي پيدا كردن شيء موردنظر شما بايد از قبل آن را بشناسند. مطابق ويدئو، در بخشي از آزمايش ربات مشاهده ميكند كه محتويات كشو طبق برنامهريزيهاي او مرتب نشده است (كتابها در كشوي اول قرار ندارند) بنابراين با توجه به نداشتن ذهنيت قبلي جستوجو را ادامه نميدهد.
فرآيند حل مسئلهي ساده براي انسان بديهي است اما ممكن است براي ربات اينطور نباشد. حتي در اين آزمايش هم، ربات چند مرتبه به دلايل مختلف و در تلاش براي رسيدن به اهداف خود شكست خورد. بااينحال فضايي براي پيشرفت وجود دارد.





 ربات ماژولار SMORES-EP از كشو بالا رفته و از شكاف ها عبور ميكند
ربات ماژولار SMORES-EP از كشو بالا رفته و از شكاف ها عبور ميكند